Extending Human Comprehension Through Vision and Innovation
We challenge the tried and true, to simplify the complex.
This allows us to provide to you cost effective and complete solutions to bring your inventive dreams into product reality.
We provide project specific solutions, from mobile applications using the Internet of Things to complex robotics and artificial intelligence (AI), in a complete and confidential manner.
Since its inception in 2002, Controlled Capture Systems has helped many businesses make their new product lines a reality, by providing timely proof of concept prototypes to production ready designs.
Our solutions include:
Internet of Things connectivity, voice control, computer vision, machine learning, and artificial intelligence (AI).
hardware and software data acquisition development and interfacing.
software development using:
C, Android™, JAVA™, C#, Python, Javascript, LabVIEW™, and other programming languages.
Reactive, low memory, and other artificial intelligence (AI)
Propeller, AVR, Cortex micro-controller interface and firmware development.
image processing, automated image detail measurement, and image stitching.
external sensor integration with triggered or timed monitoring for process data collection.
robotics systems and motion control design and integration.
schematic capture, printed circuit layout, and prototype board services.
2D and 3D mechanical design, CAD and other documentation services.
design and manufacture of proof of concept to production systems for investor presentation.
We invite you to contact Controlled Capture Systems to discuss your project requirements and
specifications. Together we will bring simplicity and success to your product dream.
Dreams to Reality Portfolio
"A man is but the product of his thoughts, what he thinks, he becomes."-Mahatma Gandhi
Introducing the “Passive Portal™”, a walk-through weapons security detection system. This patented artificial intelligence (AI) technology is an advanced passive scanning technology for detecting and identifying concealed threats. The versatility of the system allows for covert installation, with no visual presence. It can also be deployed with portable battery powered operations. Contrary to the current scanning and detection technology in the market, the Passive Security Scan system emits no electromagnetic energy or other harmful radiation.
“I am sure many of you have done childhood experiments, using a bar magnet placed under a piece of paper, and then sprinkled iron filings on top of the paper. Remember the almost bubble like lines that appeared that were produced by the poles of the magnet. These lines also exist on earth, which can be thought of as a very large magnet. Now, consider these magnetic lines around the earth as a fog. Our system is tuned to this fog, and any item that is surrounded by its own magnetic field, like a firearm, will produce a hole in this fog. This is what we detect. The holes in the fog.” excerpt: presentation by R. Fluck
The passive scanning artificial intelligence (AI) technology and Passive Portal concealed weapons detection system is manufactured under exclusive license by Passive Security Scan, Inc. who was formed in 2017 to bring products to market in the areas of personnel and collateral protection. The company currently has several products in development that will change the face of their respective industries. Passive Security Scan, Inc. is a wholly owned subsidiary of Defense Technologies International Corp., who is a publicly traded US company under the symbol DTII.
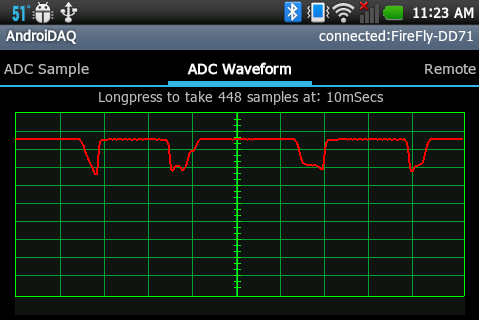
AndroiDAQ™: Data Acquisition for Android, for the Internet of Things
Introducing AndroiDAQ: an eight-core, parallel processing, wired and wireless, data acquisition system for Android, with 16-channels of timers and counters, that can also preform as digital inputs or outputs, with 8 more channels of analog to digital conversion. AndroiDAQ is data acquisition for Android, which is also compatible with Windows or Linux, using LabVIEW, Java, C#, Python, and many more programming languages. AndroiDAQ was designed to help take your product into the age for the Internet of Things.
Imagine not having to think about interrupts when programming for your next project.
Imagine processing in a parallel, not linear.
Imagine not being limited by counter/timer availability.
"Imagination is everything. It is the preview of life's coming attractions." -Albert Einstein
Proof-of-Concept to Production
Your Product Developed
You have the idea and we can help you make that idea a reality. We offer a full range of hardware and software development services to get your product designed quickly and ready for the market. We can take your product ideas from concept to reality using the latest engineering and development environments.
We provide proof-of-concept to production schematic capture,
printed circuit layout, mechanical design and blueprinting, firmware and software development, artificial intelligence (AI) programming, and preproduction manufacturing services. Using our services, we can help you with any or all phases of :
Research is creating new knowledge. -Neil Armstrong
Informative Articles to Stay in the Know.
Electronics, a Plethora of Parts and How to Choose
Everyday, new electronic hardware and parts are announced and made available on the market for use in new product designs.
Today there is a plethora of electronic devices and parts available that not only vary in their capabilities and functions, but also in their pricing and product age. During new product design and development, careful selection must be made of the parts that make up the new product to avoid end-of-life or soon-to-be obsolete parts, and to also maximize its sustainability and profitability.
If perchance an inexperienced designer unknowingly selects a slated end-of-life part during new product development, the product’s viability and cost can be greatly affected when that part is discontinued. This is due to the necessity of having to find a direct substitute for that part, which may or may not exist, and depending on that part’s function in the system can necessitate the need to redesign the new product as a whole, an expensive process.
Increasingly, I have also observed that investors require that start-ups and small businesses prove that their new product design idea is designed using the most current electronic parts and device standards. They also require that the design has been reduced to its lowest possible production cost to increase its potential profitability. This poses a very daunting task, especially when one is starting a new business and also trying to develop a new product for sale in the market at the same time.
To ensure that we are using the most up-to-date parts for new product designs for our clients, my company strives to be well versed in the current cutting edge technologies, methodologies, parts, and devices. This is done by signing up to receive new product bulletins from the many electronic device manufacturers and vendors that we use. We also sign up to be notified by our manufacturers of potential end of life scenarios on parts that are currently used in our and our client’s designs. While reviewing these bulletins, we note not only potential substitutes for parts used in current client designs, but also produce a list of potential devices that could be used in future new designs for new clients.
My question to you is this: how does your company, in this ever changing electronics world, ensure that you are using the most up to date and cost effective electronic parts and devices in your new product designs?
Prototyping -From Dreamscape to Reality
In 1984, Joseph Ruben directed a science fiction film called “Dreamscape”. In this movie, you are taken to a lab where scientists and system integrators are busy developing head gear, to aid in the monitoring and control of dreams. The first appearance of this head gear is very crude, as it is cumbersome, bulky, and heavy, with wires and leads sticking out everywhere, but later, as the development on the head gear continues, it becomes a sleek, fully functional, and lightweight head set.
Many times in my career as a systems integrator, I have made reference to this movie to my clients, during product development, as the movie’s product development story-line is especially useful to help clients understand the paper napkin to actual working prototype phase. During this phase, which I call the ugly duckling phase, a system integrator will assist the client in determining the specifications for what the proof of concept product will actually do and also how they foresee it to be used or operated by their customers. Here, a systems integrator’s experience and knowledge in the vast and sundry lists of product lines and product abilities, helps to create a “how” the product could be made, and a “with what” sub-product integration plan. These steps are essential for the proof of concept prototype and for systems integration for it, as the steps provide how the individual parts are interconnected to operate as a whole. A systems integrator’s experience saves money and development time during this product development phase.
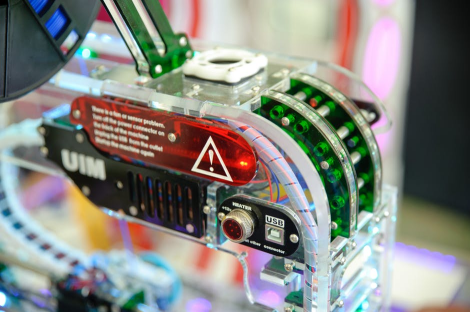
The image above is a robotic imaging system that was used to acquire thousands of images of the inside of a grocery store. This system then stitched these images together for a complete internal view of the store, which then allowed for a remote virtual walk-through of the store by vendors and product manufacturers. Here, you can see that the proof of concept prototype started as a crude but effective structure with nine cameras, though as the prototype evolved into a product, it was found that these tasks could be performed by three higher end cameras more efficiently and more cost efficiently. These changes were made due to technology changes to products during the design phase, overstated specifications of products from manufacturers who didn’t understand their products or who never tested their products under the new circumstances presented by the newly developed system, and for several other reasons including cost savings.
I use this robotic imaging system as an example, to illustrate that during the prototyping stage for a product, an easily modifiable framework is typically built. This framework is fluid and will change many times during the development and testing of the product. This is true for both hardware and software products and systems. These changes are typically due to subsection assemblies presenting their limitations and/or incompatibilities, which ironically everyone on the team initially thinks are assets to the product. This leads to reevaluating the hardware and/or software of the prototype design, and then selecting new technology and integrating it into the now existing system for retesting. These steps are essential during product development and design, as they allow new and unseen pathways to be taken for better product development and improved specifications to be made for the product, so that in the end, the team creates a better end product overall. This is the prototype evolution of a paper napkin dream to product reality.
The journey that I have undertaken, meeting people from all walks of life and learning from them, has been my biggest achievement. -Aamir Khan
Contact Information
We invite you to contact Controlled Capture Systems to discuss your project requirements and specifications. We welcome and can supply mutual non-disclosure agreements so that we can fully discuss your project needs. When contacting us, please provide as much information as possible about your project so that we can develop a good foundation for our discussions with you regarding your idea and product development goals. It is our goal to help you in your success.!
Controlled Capture Systems
271 9th Street, Idaho Falls, Idaho 83404-4806
Phone: 208-557-0300
Email: sales@controlcapture.com
Who is Controlled Capture Systems?
Frederick (Rick) Fluck is the CEO and founder of Controlled Capture Systems. Mr. Fluck is a US Navy veteran with over 30 years’ experience in project management, software and hardware design and development, machine vision using artificial intelligence (AI), and product design engineering. He holds several issued (US7408461B2) and pending patents, including a joint patent (US7013245B2) with the Department of Energy. Since its inception in 2002, Controlled Capture Systems has successfully developed many computer-controlled vision systems for organizations such as: NASA's Jet Propulsion Laboratory, 3M, the Alaska Science Center, GModelo, and many other large and small businesses.
A note from Rick: I have been designing interface electronic circuits for various companies and systems since 1987, including printed circuit board layout. I started programming computers when I bought a kit from Radio Shack in 1977 and in high school on a Commodore PET. From there I have learned Basic, C, Perl, JAVA, HTML, css, xml, php and other web programming languages. I have many firmware languages under my belt for various micro-controllers. I currently enjoy programming with C#, Java, Android, LabVIEW, and IMAQ (both are graphical programming and image processing languages), and OpenCV which includes artificial intelligence (AI). I enjoy metal and wood lathe turning and milling, following blueprints that I design in AutoCAD, and 3D design for CNC in Fusion 360. I am trained in silver-smithing and lost wax casting. I am a nuclear trained US Navy submarine veteran.